软反向传播 SpikingFlow.softbp¶
本教程作者: fangwei123456
本节教程主要关注 SpikingFlow.softbp,介绍软反向传播的概念、可微分SNN神经元的使用方式。
需要注意的是,SpikingFlow.softbp 是一个相对独立的包,与其他的 SpikingFlow.* 中的神经元、突触等组件不能混用。
软反向传播的灵感,来源于以下两篇文章:
Mentzer F, Agustsson E, Tschannen M, et al. Conditional probability models for deep image compression[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. 2018: 4394-4402.
Wu Y, Deng L, Li G, et al. Spatio-temporal backpropagation for training high-performance spiking neural networks[J]. Frontiers in neuroscience, 2018, 12: 331.
SNN之于RNN¶
可以将SNN中的神经元看作是一种RNN,它的输入是电压增量(或者是电流,但为了方便,在 SpikingFlow.softbp 中用电压增量),隐藏状态是膜电压,输出是脉冲。这样的SNN神经元是具有马尔可夫性的:当前时刻的输出只与当前时刻的输入、神经元自身的状态有关。
可以用以下描述方程来描述任意的SNN:
其中 \(V(t)\) 是神经元的膜电压;\(X(t)\) 是外源输入,例如电压增量;\(H(t)\) 是神经元的隐藏状态,可以理解为神经元还没有发放脉冲前的瞬时电压;\(f(V(t-1), X(t))\) 是神经元的状态更新方程,不同的神经元,区别就在于更新方程不同。
例如对于LIF神经元,状态更新方程,及其离散化的方程如下:
由于状态更新方程不能描述脉冲发放的过程,因此我们用 \(H(t)\) 来代替 \(V(t)\),用 \(V(t)\) 表示完成脉冲发放(或者不发放)过程后的神经元膜电压。
\(S(t)\) 是神经元发放的脉冲,\(g(x)=\Theta(x)\) 是阶跃函数,或者按RNN的习惯称为门控函数,输出仅为0或1,可以表示脉冲的发放过程,定义为
发放脉冲,则电压重置为 \(V_{reset}\);没有发放脉冲,则电压不变,这就是描述方程的最后一个方程,电压状态转移方程。
硬前向与软反向¶
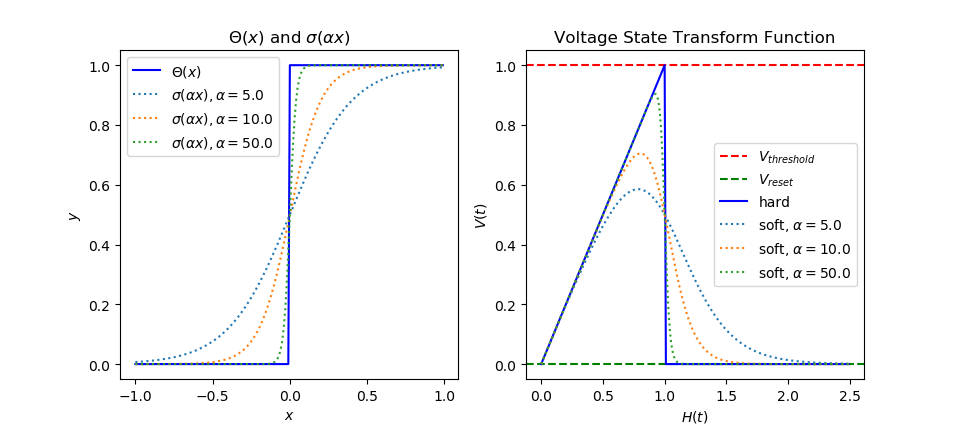
RNN使用可微分的门控函数,例如tanh函数。而SNN的门控函数 \(g(x)=\Theta(x)\) 显然是不可微分的,这就导致了SNN虽然一定程度上与RNN非常相似,但不能用梯度下降、反向传播来训练。但我们可以用一个形状与 \(g(x)=\Theta(x)\) 非常相似,但可微分的门控函数\(\sigma(x)\) 去替换它。
我们这一方法的核心思想是:在前向传播时,使用 \(g(x)=\Theta(x)\),神经元的输出是离散的0和1,我们的网络仍然是SNN;而反向传播时,使用近似门控函数 \(g'(x)=\sigma'(x)\) 来求梯度。最常见的近似 \(g(x)=\Theta(x)\) 的门控函数即为sigmoid函数 \(\sigma(\alpha x)=\frac{1}{1 + exp(-\alpha x)}\),\(\alpha\) 可以控制函数的平滑程度,越大的 \(\alpha\) 会越逼近 \(\Theta(x)\) 但梯度越不光滑,网络也会越难以训练。近似门控函数引入后,电压状态转移函数 \(V(t) = H(t) \cdot (1 - S(t)) + V_{reset} \cdot S(t)\) 也会随之改变。下图显示了不同的 \(\alpha\) 以及电压状态转移方程:
默认的近似门控函数为 SpikingFlow.softbp.soft_pulse_function.Sigmoid()。近似门控函数是 softbp 包中基类神经元构造函数的参数之一:
class BaseNode(nn.Module):
def __init__(self, v_threshold=1.0, v_reset=0.0, pulse_soft=soft_pulse_function.Sigmoid(), monitor=False):
'''
:param v_threshold: 神经元的阈值电压
:param v_reset: 神经元的重置电压。如果不为None,当神经元释放脉冲后,电压会被重置为v_reset;如果设置为None,则电压会被减去阈值
:param pulse_soft: 反向传播时用来计算脉冲函数梯度的替代函数,即软脉冲函数
:param monitor: 是否设置监视器来保存神经元的电压和释放的脉冲。
若为True,则self.monitor是一个字典,键包括'v'和's',分别记录电压和输出脉冲。对应的值是一个链表。为了节省显存(内存),列表中存入的是原始变量
转换为numpy数组后的值。还需要注意,self.reset()函数会清空这些链表
'''
在 SpikingFlow.softbp.soft_pulse_function 中还提供了其他的可选近似门控函数。
如果想要自定义新的近似门控函数,可以参考 soft_pulse_function.Sigmoid() 的代码实现:
class sigmoid(torch.autograd.Function):
@staticmethod
def forward(ctx, x, alpha):
if x.requires_grad:
alpha_x = x * alpha
ctx.save_for_backward(alpha_x)
ctx.alpha = alpha
return (alpha_x >= 0).float()
@staticmethod
def backward(ctx, grad_output):
grad_x = None
if ctx.needs_input_grad[0]:
alpha_x = ctx.saved_tensors[0]
s_x = torch.sigmoid(alpha_x)
grad_x = grad_output * s_x * (1 - s_x) * ctx.alpha
return grad_x, None
作为激活函数的SNN神经元¶
解决了SNN的微分问题后,我们的SNN神经元可以像激活函数那样,嵌入到使用PyTorch搭建的任意网络中去了。在 SpikingFlow.softbp.neuron 中已经实现了IF神经元和LIF神经元,可以很方便地搭建各种网络,例如一个简单的全连接网络:
net = nn.Sequential(
nn.Linear(100, 10, bias=False),
neuron.LIFNode(tau=100.0, v_threshold=1.0, v_reset=5.0)
)
MNIST分类¶
现在我们使用 SpikingFlow.softbp.neuron 中的LIF神经元,搭建一个双层全连接网络,对MNIST数据集进行分类:
import torch
import torch.nn as nn
import torch.nn.functional as F
import torchvision
import sys
sys.path.append('.')
import SpikingFlow.softbp.neuron as neuron
import SpikingFlow.encoding as encoding
from torch.utils.tensorboard import SummaryWriter
import readline
class Net(nn.Module):
def __init__(self, tau=100.0, v_threshold=1.0, v_reset=0.0):
super().__init__()
# 网络结构,简单的双层全连接网络,每一层之后都是LIF神经元
self.fc = nn.Sequential(
nn.Flatten(),
nn.Linear(28 * 28, 14 * 14, bias=False),
neuron.LIFNode(tau=tau, v_threshold=v_threshold, v_reset=v_reset),
nn.Linear(14 * 14, 10, bias=False),
neuron.LIFNode(tau=tau, v_threshold=v_threshold, v_reset=v_reset)
)
def forward(self, x):
return self.fc(x)
def reset_(self):
for item in self.modules():
if hasattr(item, 'reset'):
item.reset()
def main():
device = input('输入运行的设备,例如“CPU”或“cuda:0” ')
dataset_dir = input('输入保存MNIST数据集的位置,例如“./” ')
batch_size = int(input('输入batch_size,例如“64” '))
learning_rate = float(input('输入学习率,例如“1e-3” '))
T = int(input('输入仿真时长,例如“50” '))
tau = float(input('输入LIF神经元的时间常数tau,例如“100.0” '))
train_epoch = int(input('输入训练轮数,即遍历训练集的次数,例如“100” '))
log_dir = input('输入保存tensorboard日志文件的位置,例如“./” ')
writer = SummaryWriter(log_dir)
# 初始化数据加载器
train_data_loader = torch.utils.data.DataLoader(
dataset=torchvision.datasets.MNIST(
root=dataset_dir,
train=True,
transform=torchvision.transforms.ToTensor(),
download=True),
batch_size=batch_size,
shuffle=True,
drop_last=True)
test_data_loader = torch.utils.data.DataLoader(
dataset=torchvision.datasets.MNIST(
root=dataset_dir,
train=False,
transform=torchvision.transforms.ToTensor(),
download=True),
batch_size=batch_size,
shuffle=True,
drop_last=False)
# 初始化网络
net = Net(tau=tau).to(device)
# 使用Adam优化器
optimizer = torch.optim.Adam(net.parameters(), lr=learning_rate)
# 使用泊松编码器
encoder = encoding.PoissonEncoder()
train_times = 0
for _ in range(train_epoch):
net.train()
for img, label in train_data_loader:
img = img.to(device)
optimizer.zero_grad()
# 运行T个时长,out_spikes_counter是shape=[batch_size, 10]的tensor
# 记录整个仿真时长内,输出层的10个神经元的脉冲发放次数
for t in range(T):
if t == 0:
out_spikes_counter = net(encoder(img).float())
else:
out_spikes_counter += net(encoder(img).float())
# out_spikes_counter / T 得到输出层10个神经元在仿真时长内的脉冲发放频率
out_spikes_counter_frequency = out_spikes_counter / T
# 损失函数为输出层神经元的脉冲发放频率,与真实类别的交叉熵
# 这样的损失函数会使,当类别i输入时,输出层中第i个神经元的脉冲发放频率趋近1,而其他神经元的脉冲发放频率趋近0
loss = F.cross_entropy(out_spikes_counter_frequency, label.to(device))
loss.backward()
optimizer.step()
# 优化一次参数后,需要重置网络的状态,因为SNN的神经元是有“记忆”的
net.reset_()
# 正确率的计算方法如下。认为输出层中脉冲发放频率最大的神经元的下标i是分类结果
correct_rate = (out_spikes_counter_frequency.max(1)[1] == label.to(device)).float().mean().item()
writer.add_scalar('train_correct_rate', correct_rate, train_times)
if train_times % 1024 == 0:
print(device, dataset_dir, batch_size, learning_rate, T, tau, train_epoch, log_dir)
print('train_times', train_times, 'train_correct_rate', correct_rate)
train_times += 1
net.eval()
with torch.no_grad():
# 每遍历一次全部数据集,就在测试集上测试一次
test_sum = 0
correct_sum = 0
for img, label in test_data_loader:
img = img.to(device)
for t in range(T):
if t == 0:
out_spikes_counter = net(encoder(img).float())
else:
out_spikes_counter += net(encoder(img).float())
correct_sum += (out_spikes_counter.max(1)[1] == label.to(device)).float().sum().item()
test_sum += label.numel()
net.reset_()
writer.add_scalar('test_correct_rate', correct_sum / test_sum, train_times)
if __name__ == '__main__':
main()
这份代码位于 SpikingFlow.softbp.examples.mnist.py。进入 SpikingFlow 的根目录(也就是GitHub仓库的根目录),直接运行即可,例如:
(pytorch-env) wfang@pami:~/SpikingFlow$ python SpikingFlow/softbp/examples/mnist.py
输入运行的设备,例如“CPU”或“cuda:0” cuda:0
输入保存MNIST数据集的位置,例如“./” ./tempdir
输入batch_size,例如“64” 256
输入学习率,例如“1e-3” 1e-2
输入仿真时长,例如“50” 50
输入LIF神经元的时间常数tau,例如“100.0” 100.0
输入训练轮数,即遍历训练集的次数,例如“100” 1000
输入保存tensorboard日志文件的位置,例如“./” ./tempdir
需要注意的是,训练这样的SNN,所需显存数量与仿真时长 T 线性相关,更长的 T 相当于使用更小的仿真步长,训练更为“精细”,训练效果也一般更好。这个模型只占用了 276MB 显存,但在之后的CIFAR10示例中,由于CNN的引入,使得显存消耗量剧增。
我们的这个模型,在Tesla K80上训练一个半小时,tensorboard记录的数据如下所示:
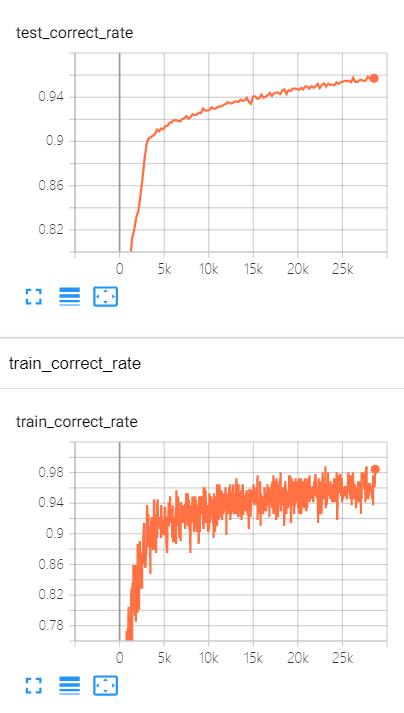
这个模型最终能够达到98%的测试集正确率,如下图所示,注意下图中的“epoch”表示训练次数,而代码中的“epoch”表示遍历一次训练集:
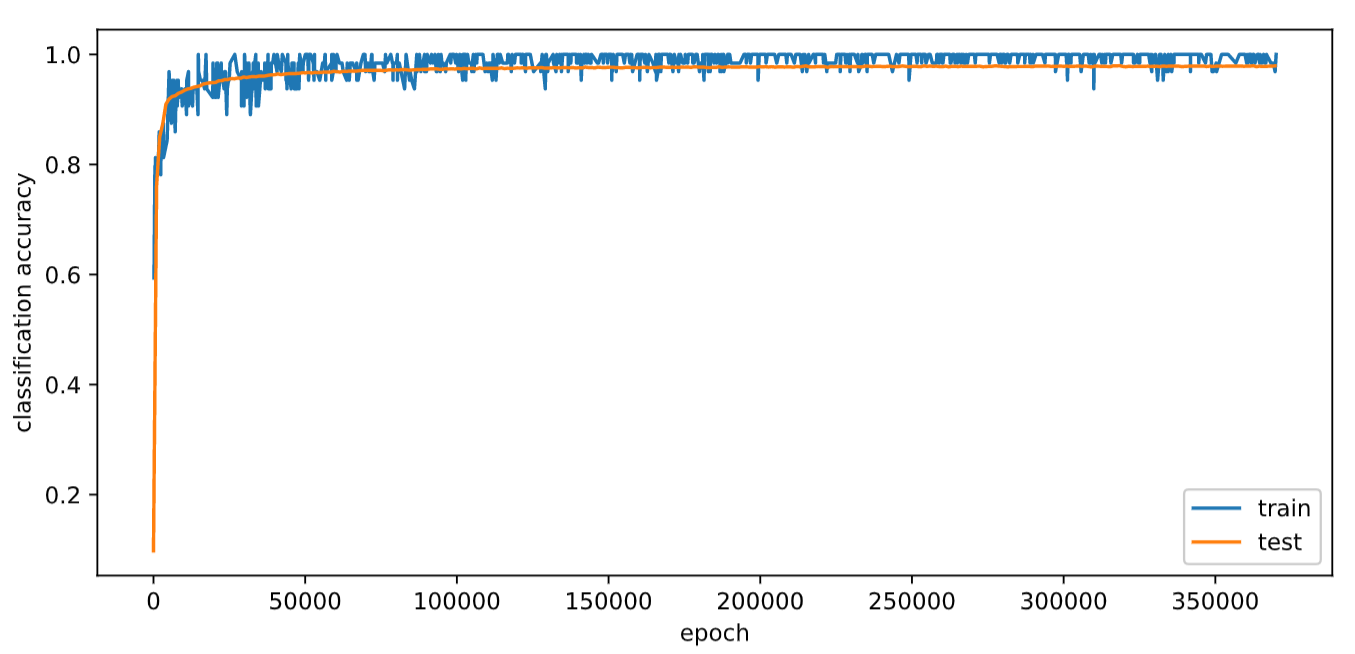
如果使用训练集增强的方法,例如给训练集图片加上一些随机噪声、仿射变换等,则训练好的网络泛化能力会进一步提升,最高能达到99%以上的测试集正确率。
CIFAR10分类¶
我们的这种方法,具有的一大优势就是可以无缝嵌入到任意的PyTorch搭建的网络中。因此CNN的引入是非常简单而自然的。我们用CNN来进行CIFAR10分类任务,训练的代码与进行MNIST分类几乎相同,只需要更改一下网络结构和数据集。
class Net(nn.Module):
def __init__(self, tau=100.0, v_threshold=1.0, v_reset=0.0):
super().__init__()
# 网络结构,卷积-卷积-最大池化堆叠,最后接一个全连接层
self.conv = nn.Sequential(
nn.Conv2d(3, 256, kernel_size=3, padding=1),
nn.BatchNorm2d(256),
neuron.LIFNode(tau=tau, v_threshold=v_threshold, v_reset=v_reset),
nn.Conv2d(256, 256, kernel_size=3, padding=1),
nn.MaxPool2d(2, 2),
nn.BatchNorm2d(256),
neuron.LIFNode(tau=tau, v_threshold=v_threshold, v_reset=v_reset), # 16 * 16
nn.Conv2d(256, 256, kernel_size=3, padding=1),
nn.BatchNorm2d(256),
neuron.LIFNode(tau=tau, v_threshold=v_threshold, v_reset=v_reset),
nn.Conv2d(256, 256, kernel_size=3, padding=1),
nn.MaxPool2d(2, 2),
nn.BatchNorm2d(256),
neuron.LIFNode(tau=tau, v_threshold=v_threshold, v_reset=v_reset), # 8 * 8
nn.Conv2d(256, 256, kernel_size=3, padding=1),
nn.BatchNorm2d(256),
neuron.LIFNode(tau=tau, v_threshold=v_threshold, v_reset=v_reset),
nn.Conv2d(256, 256, kernel_size=3, padding=1),
nn.MaxPool2d(2, 2),
nn.BatchNorm2d(256),
neuron.LIFNode(tau=tau, v_threshold=v_threshold, v_reset=v_reset), # 4 * 4
)
self.fc = nn.Sequential(
nn.Flatten(),
nn.Linear(256 * 4 * 4, 10, bias=False),
neuron.LIFNode(tau=tau, v_threshold=v_threshold, v_reset=v_reset)
)
def forward(self, x):
return self.fc(self.conv(x))
def reset_(self):
for item in self.modules():
if hasattr(item, 'reset'):
item.reset()
def main():
device = input('输入运行的设备,例如“CPU”或“cuda:0” ')
dataset_dir = input('输入保存CIFAR10数据集的位置,例如“./” ')
batch_size = int(input('输入batch_size,例如“64” '))
learning_rate = float(input('输入学习率,例如“1e-3” '))
T = int(input('输入仿真时长,例如“50” '))
tau = float(input('输入LIF神经元的时间常数tau,例如“100.0” '))
train_epoch = int(input('输入训练轮数,即遍历训练集的次数,例如“100” '))
log_dir = input('输入保存tensorboard日志文件的位置,例如“./” ')
writer = SummaryWriter(log_dir)
# 初始化数据加载器
train_data_loader = torch.utils.data.DataLoader(
dataset=torchvision.datasets.CIFAR10(
root=dataset_dir,
train=True,
transform=torchvision.transforms.ToTensor(),
download=True),
batch_size=batch_size,
shuffle=True,
drop_last=True)
test_data_loader = torch.utils.data.DataLoader(
dataset=torchvision.datasets.CIFAR10(
root=dataset_dir,
train=False,
transform=torchvision.transforms.ToTensor(),
download=True),
batch_size=batch_size,
shuffle=True,
drop_last=False)
# 后面的代码与MNIST分类相同,不再展示
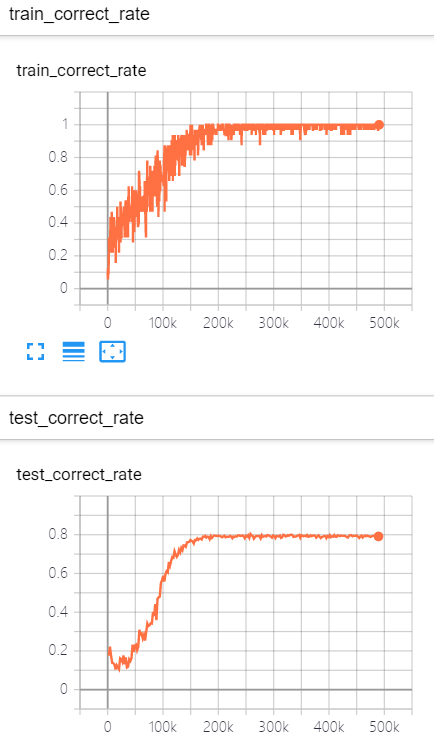
这份代码位于 SpikingFlow.softbp.examples.cifar10.py,运行方法与之前的MNIST的代码相同。需要注意的是,由于CNN的引入,CNN层后也跟有LIF神经元,CNN层的输出是一个高维矩阵,因此其后的LIF神经元数量众多,导致这个模型极端消耗显存。在大约 batch_size=32,仿真时长 T=50 的情况下,这个模型几乎要消耗 12G 的显存。训练这样庞大模型,Tesla K80的算力显得捉襟见肘。我们在TITAN RTX上训练大约60小时,网络才能收敛,测试集正确率大约为80%。使用训练集增强的方法,同样可以提高泛化能力。
模型流水线¶
如前所述,在包含SNN神经元的网络中引入CNN后,显存的消耗量剧增。有时一个网络太大,以至于单个GPU无法放下。在这种情况下,我们可以将一个网络分割到多个GPU存放,充分利用多GPU闲置显存的优势。但使用这一方法,数据需要在多个GPU之间来回复制,在一定程度上会降低训练速度。
SpikingFlow.softbp.ModelPipeline 是一个基于流水线多GPU串行并行的基类,使用者只需要继承 ModelPipeline,然后调用 append(nn_module, gpu_id),就可以将 nn_module 添加到流水线中,并且 nn_module 会被运行在 gpu_id 上。在调用模型进行计算时, forward(x, split_sizes) 中的 split_sizes 指的是输入数据 x 会在维度0上被拆分成每 split_size 一组,得到 [x[0], x[1], ...],这些数据会被串行的送入 module_list 中保存的各个模块进行计算。
例如将模型分成4部分,因而 module_list 中有4个子模型;将输入分割为3部分,则每次调用 forward(x, split_sizes) ,函数内部的计算过程如下:
step=0 x0, x1, x2 |m0| |m1| |m2| |m3|
step=1 x0, x1 |m0| x2 |m1| |m2| |m3|
step=2 x0 |m0| x1 |m1| x2 |m2| |m3|
step=3 |m0| x0 |m1| x1 |m2| x2 |m3|
step=4 |m0| |m1| x0 |m2| x1 |m3| x2
step=5 |m0| |m1| |m2| x0 |m3| x1, x2
step=6 |m0| |m1| |m2| |m3| x0, x1, x2
不使用流水线,则任何时刻只有一个GPU在运行,而其他GPU则在等待这个GPU的数据;而使用流水线,例如上面计算过程中的 step=3 到step=4,尽管在代码的写法为顺序执行:
x0 = m1(x0)
x1 = m2(x1)
x2 = m3(x2)
但由于PyTorch优秀的特性,上面的3行代码实际上是并行执行的,因为这3个在CUDA上的计算使用各自的数据,互不影响。
我们将之前的CIFAR10代码更改为多GPU流水线形式,修改后的代码位于 SpikingFlow.softbp.examples.cifar10.py。它的内容与 SpikingFlow.softbp.examples.cifar10.py 基本类似,我们只看主要的改动部分。
模型的定义,直接继承了 ModelPipeline。将模型拆成了5个部分,由于越靠前的层,输入的尺寸越大,越消耗显存,因此前面的少部分层会直接被单独分割出,而后面的很多层则放到了一起。需要注意的是,每次训练后仍然要重置LIF神经元的电压,因此要额外写一个重置函
数 reset_():
class Net(softbp.ModelPipeline):
def __init__(self, gpu_list, tau=100.0, v_threshold=1.0, v_reset=0.0):
super().__init__()
# 网络结构,卷积-卷积-最大池化堆叠,最后接一个全连接层
self.append(
nn.Sequential(
nn.Conv2d(3, 256, kernel_size=3, padding=1),
nn.BatchNorm2d(256)
),
gpu_list[0]
)
self.append(
nn.Sequential(
neuron.LIFNode(tau=tau, v_threshold=v_threshold, v_reset=v_reset)
),
gpu_list[1]
)
self.append(
nn.Sequential(
nn.Conv2d(256, 256, kernel_size=3, padding=1),
nn.MaxPool2d(2, 2),
nn.BatchNorm2d(256)
),
gpu_list[2]
)
self.append(
nn.Sequential(
neuron.LIFNode(tau=tau, v_threshold=v_threshold, v_reset=v_reset) # 16 * 16
),
gpu_list[3]
)
self.append(
nn.Sequential(
nn.Conv2d(256, 256, kernel_size=3, padding=1),
nn.BatchNorm2d(256),
neuron.LIFNode(tau=tau, v_threshold=v_threshold, v_reset=v_reset),
nn.Conv2d(256, 256, kernel_size=3, padding=1),
nn.MaxPool2d(2, 2),
nn.BatchNorm2d(256),
neuron.LIFNode(tau=tau, v_threshold=v_threshold, v_reset=v_reset), # 8 * 8
nn.Conv2d(256, 256, kernel_size=3, padding=1),
nn.BatchNorm2d(256),
neuron.LIFNode(tau=tau, v_threshold=v_threshold, v_reset=v_reset),
nn.Conv2d(256, 256, kernel_size=3, padding=1),
nn.MaxPool2d(2, 2),
nn.BatchNorm2d(256),
neuron.LIFNode(tau=tau, v_threshold=v_threshold, v_reset=v_reset), # 4 * 4
nn.Flatten(),
nn.Linear(256 * 4 * 4, 10, bias=False),
neuron.LIFNode(tau=tau, v_threshold=v_threshold, v_reset=v_reset)
),
gpu_list[4]
)
def reset_(self):
for item in self.modules():
if hasattr(item, 'reset'):
item.reset()
运行这份代码,由于分割的第0部分和第3部分占用的显存较小,因此将它们全部放在 0 号GPU上,而其他部分则各独占一个GPU:
(pytorch-env) wfang@pami:~/SpikingFlow$ python ./SpikingFlow/softbp/examples/cifar10mp.py
输入使用的5个gpu,例如“0,1,2,0,3” 0,1,2,0,3
输入保存CIFAR10数据集的位置,例如“./” ./tempdir
输入batch_size,例如“64” 64
输入split_sizes,例如“16” 4
输入学习率,例如“1e-3” 1e-3
输入仿真时长,例如“50” 50
输入LIF神经元的时间常数tau,例如“100.0” 100.0
输入训练轮数,即遍历训练集的次数,例如“100” 100
输入保存tensorboard日志文件的位置,例如“./” ./tempdir
稳定运行后,查看各个GPU显存的占用:
+-----------------------------------------------------------------------------+
| Processes: GPU Memory |
| GPU PID Type Process name Usage |
|=============================================================================|
| 0 4465 C python 5950MiB |
| 1 4465 C python 9849MiB |
| 2 4465 C python 9138MiB |
| 3 4465 C python 8936MiB |
+-----------------------------------------------------------------------------+
对于模型的不同分割方法会造成不同的显存占用情况。建议首先做一个简单的分割,然后用很小的 batch_size 和 split_sizes 去运行,再检查各个GPU显存的负载是否均衡,根据负载情况来重新调整分割。
分割后的模型, batch_size=64, split_size=4,根据tensorboard的记录显示,在Tesla K80上30分钟训练了116次;使用其他相同的参数,令 batch_size=64, split_size=2,30分钟训练了62次;令 batch_size=64, split_size=32,30分钟训练了272次;令 batch_size=64, split_size=16,30分钟训练了230次;令 batch_size=32, split_size=8,30分钟训练335次;令 batch_size=32, split_size=16,30分钟训练460次;令 batch_size=32, split_size=32,30分钟训练466次;不使用模型流水线、完全在同一个GPU上运行的 SpikingFlow.softbp.examples.cifar10.py, batch_size=16,30分钟训练759次。对比如下表所示:
*.py |
batch_size |
split_size |
images/minute |
|---|---|---|---|
cifar10mp.py |
|
32 |
580 |
16 |
490 |
||
4 |
247 |
||
2 |
132 |
||
8 |
357 |
||
16 |
490 |
||
32 |
497 |
||
cifar10.py |
16 |
\ |
404 |
可以发现,参数的选择对于训练速度至关重要。合适的参数,例如 batch_size=64, split_size=32,训练速度已经明显超过单卡运行了。
持续恒定输入的更快方法¶
上文的代码中,我们使用泊松编码器 encoding.PoissonEncoder(),它以概率来生成脉冲,因此在不同时刻,这一编码器的输出是不同的。如果我们使用恒定输入,则每次前向传播时,不需要再重新启动一次流水线,而是可以启动一次流水线并一直运行,达到更快的速度、更小的显存占用。对于持续 T 的恒定输入 x,可以直接调用 ModelPipeline.constant_forward(self, x, T, reduce) 进行计算。
我们将之前的代码进行更改,去掉编码器部分,将图像数据直接送入SNN。在这种情况下,我们可以认为SNN的第一个卷积层起到了“编码器”的作用:它接收图像作为输入,并输出脉冲。这种能够参与训练的编码器,通常能够起到比泊松编码器更好的编码效果,最终网络的分类性能也会有一定的提升。更改后的代码位于 SpikingFlow.softbp.examples.cifar10cmp.py,代码的更改非常简单,主要体现在:
class Net(softbp.ModelPipeline):
...
# 使用父类的constant_forward来覆盖父类的forward
def forward(self, x, T):
return self.constant_forward(x, T, True)
...
def main():
...
# 直接将图像送入网络,不需要编码器
out_spikes_counter_frequency = net(img, T) / T
...
设置 batch_size=32,模型在显卡上的分布与之前相同,30分钟训练715次;去掉编码器但不使用 ModelPipeline.constant_forward(self, x, T, reduce), batch_size=64, split_size=32,30分钟训练276次。可以发现,去掉编码器后网络的训练速度会变慢;使用这一方法能够起到一倍以上的加速。