训练显存优化#
本教程作者: 黄一凡 (AllenYolk)
English version: Training Memory Optimization
本团队在ICLR 2026发表的新工作 Towards Lossless Memory-efficient Training of Spiking Neural Networks via Gradient Checkpointing and Spike Compression 提出了基于梯度检查点和脉冲压缩的深度SNN训练显存自动优化工具(源代码位于 Github )。利用该工具,用户只需添加少量代码,便可以在不损失精度且不过多影响速度的前提下,大幅降低深度SNN训练时的显存占用。
该工具已经集成到 spikingjelly.activation_based.memopt 子包中,可应用于几乎所有以多步模式运行的 spikingjelly SNN 模型。本教程将介绍其使用方式。
方法原理#
显存占用分析#
从图1可以看出,SNN的训练显存峰值远大于结构相似的ANN。而且, 中间特征 (下图浅蓝色部分)占据了SNN峰值显存的绝大部分(96%以上);这些中间特征在前向传播期间被缓存下来,以供反向传播计算梯度时使用。因此,减少中间特征显存占用是降低SNN训练显存的关键。
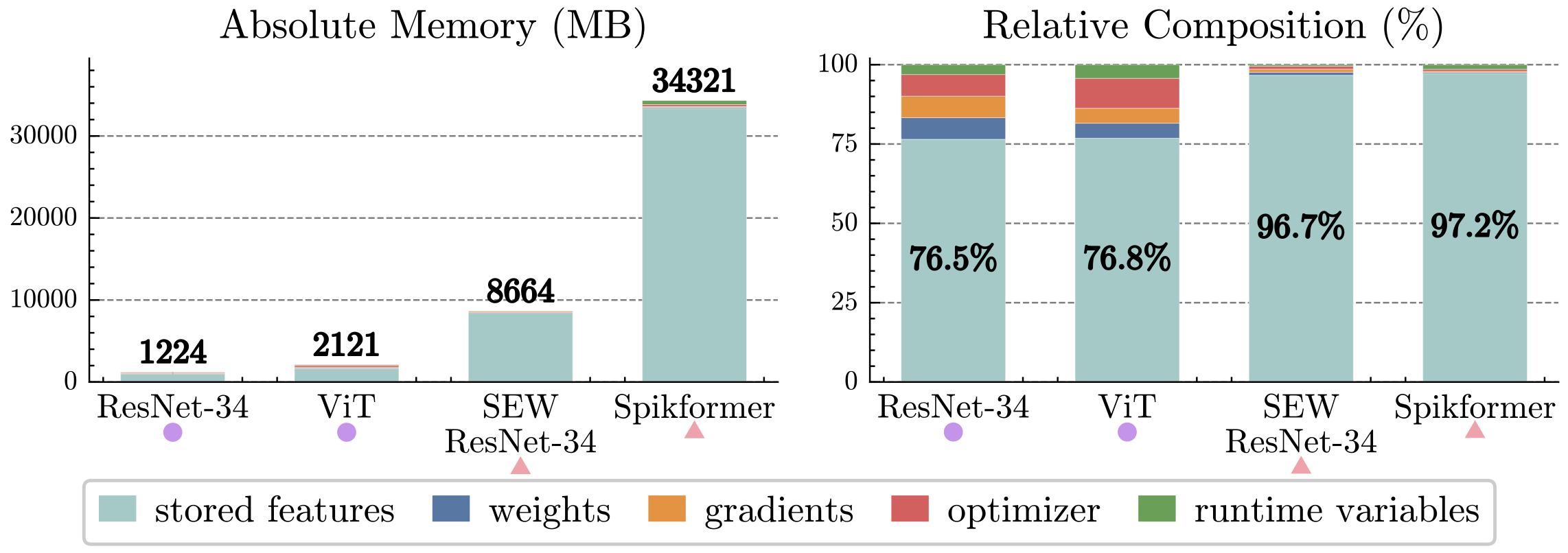
若将深度SNN视作若干个 “权重-归一化-神经元”模块 (后亦简称为 “层” )的堆叠,那么中间特征又可以细分成两个部分:
输入 :通常是二值脉冲向量。但也有例外,如网络的输入通常是浮点值,以及SEW ResNet [2] 中可能含非二值整数值。
内部状态 :权重和归一化层的中间计算结果,以及神经元的内部状态等。
梯度检查点 + 脉冲压缩#
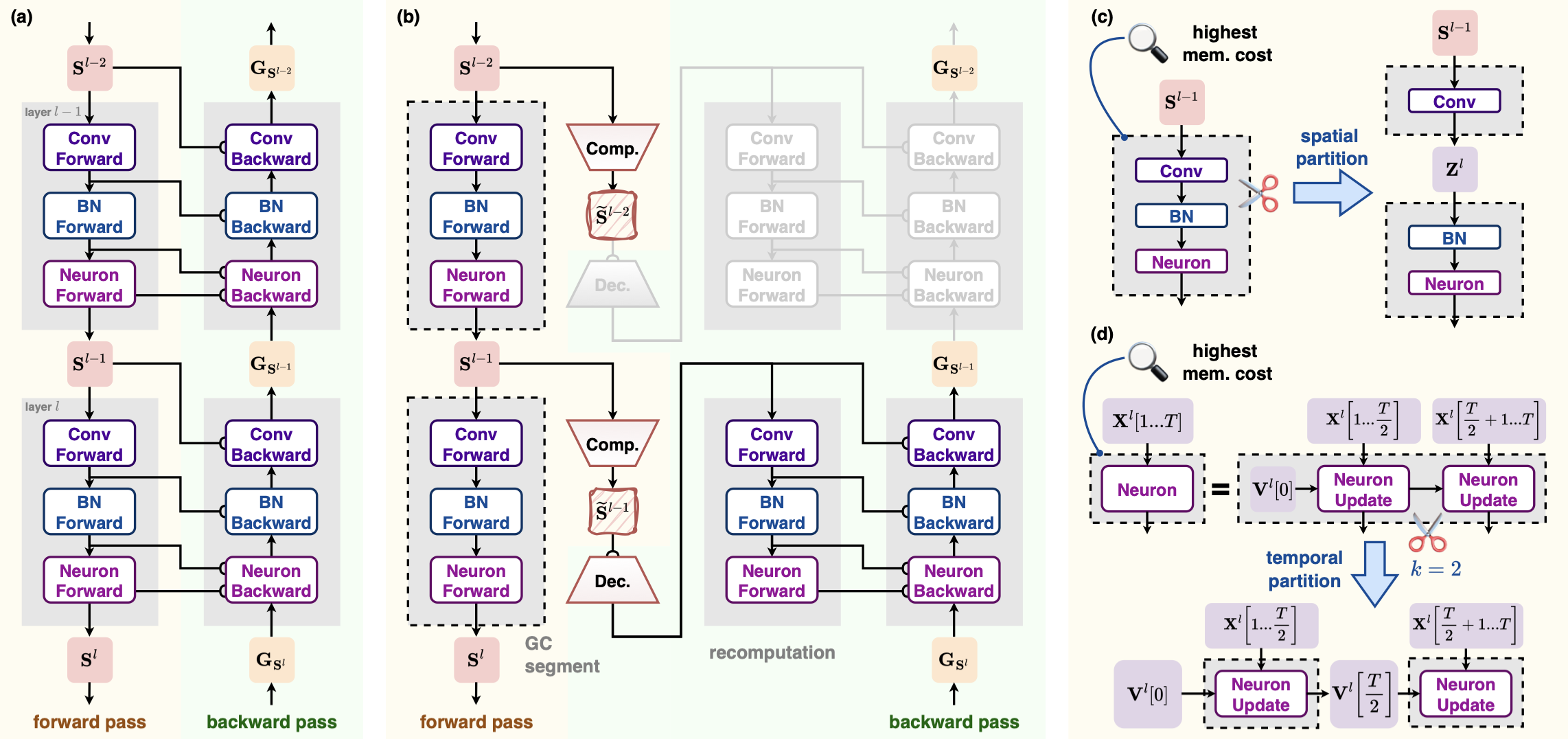
为了降低 内部状态 的显存占用,可以对每一层施加 梯度检查点 (gradient checkpointing, GC) [3] 。具体而言,在执行第 \(l\) 层的前向传播时,只缓存其输入 \(\mathbf{S}^{l-1}\) 以及其他必要的权重;所有内部状态在完成计算后立即丢弃,不再缓存。在执行第 \(l\) 层的反向传播时,首先使用 \(\mathbf{S}^{l-1}\) 和权重重新计算该层前向传播以获得内部状态(即重构该层计算图),然后再计算梯度。如此一来,同一时刻最多只有一层的内部状态会存在于显存中,峰值显存得以大幅降低。我们称施加了上述变换的、只有输入被缓存的层为 梯度检查点片段 (GC segment) ;将常规层转换为梯度检查点片段后,需要多进行一次额外前向传播,故训练耗时增加。
即使施加了逐层梯度检查点,每层的 输入 仍需缓存。前文提到,深度SNN中绝大多数层的输入都是二值脉冲张量。然而,在 spikingjelly 等框架内部,二值张量使用浮点( float32, float16, ...)表示;这保证了计算的兼容性,却带来了存储上的巨大冗余。为此,可以在缓存每层输入之前先进行 无损脉冲压缩 ,将二值浮点张量 \(\mathbf{S}^{l-1}\) 压缩到更紧凑的形式 \(\tilde{\mathbf{S}}^{l-1}\) 以节省显存;重新计算前向传播时,解压 \(\tilde{\mathbf{S}}^{l-1}\) 即可无损恢复出原始输入 \(\mathbf{S}^{l-1}\) 。实验表明,基于比特表示的压缩器(用1比特表示一个0/1值)兼具速度和压缩率,因此被选为默认的脉冲压缩器。
图2(b)展示了梯度检查点+脉冲压缩施加后的前向/反向传播计算流程。更多细节,参见原文算法1 [1] 。
检查点结构自适应调整#
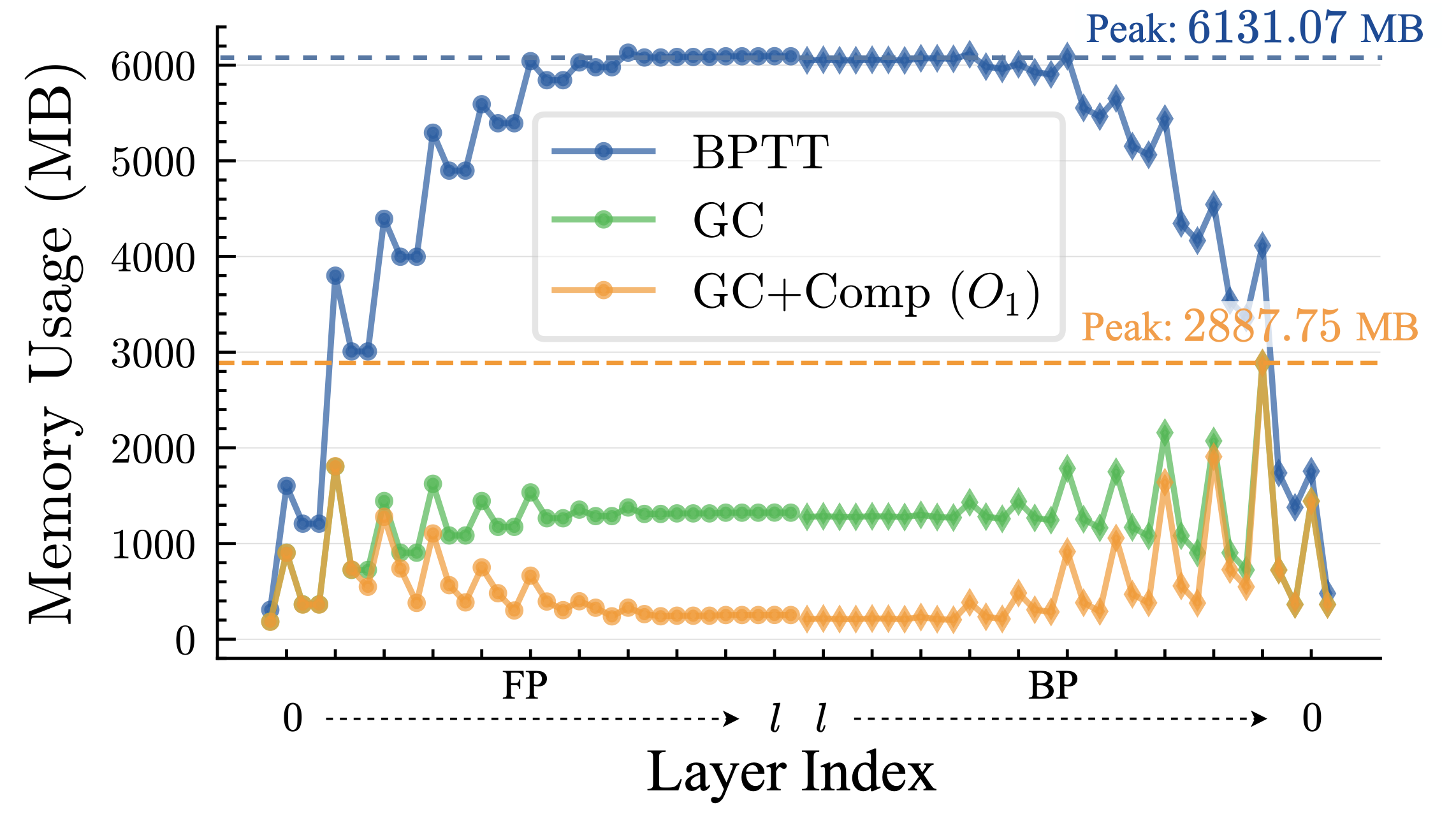
施加逐层梯度检查点+脉冲压缩后,一个训练iteration内的如化情况如图3橙色折线所示。优化后,虽然相比传统BPTT(蓝色折线)峰值显存已大幅降低,但全局峰值显存却远大于在其他层上运行时的临时显存占用。对此,我们设计了一系列检查点片段分割策略,以引入更多需缓存的输入为代价,降低关键检查点片段的大小;此外,也可地择性将一些检查点片段还原为常规层,以略微增加临时显存开销为代价,加快训练速度,同时不增加峰值显存。具体流程为:
空间分割:找出峰值显存开销所在的检查点片段,将其沿空间分割成两个更小的检查点片段。重复此步骤,直到无法进一步降低峰值显存。见图2(c)。
时间分割:找出峰值显存开销所在的检查点片段,将其沿时间轴分割成 \(k\) 个更小的检查点片段。重复此步骤,直到无法进一步降低峰值显存。见图2(d)。
贪心还原:测量每个检查点片段的前向传播用时,并降序排列。按序尝试将每个检查点片段还原为常规层。一步变换后,若峰值显存不增加,则保留;否则撤销这一步变换。
更多细节,参见原文算法2 [1] 。
备注
先考虑空间分割,再考虑时间分割;换言之,时间分割仅仅作为空间分割的补充。这是因为:时间分割与时间维度并行方法不兼容;而且,这限制了沿着时间步的内核融合(原本可将 \(T\) 步融合到一个内核,分割后则需运行 \(k\) 个 \(T/k\) 步的内核),降低了速度。
使用说明#
实现方式简述#
本框架使用以下两个类来表示检查点片段:
GCContainer:nn.Sequential的子类,含一系列nn.Module成员。重写了forward方法,以实现梯度检查点逻辑。TCGCContainer:GCContainer的子类,额外记录了时间维度分段的份数。重写了forward方法,以实现时间分段 (temporal chunked) 梯度检查点的逻辑。
上一节介绍的整个优化过程被封装为 memory_optimization 函数。它将根据显存/时间分析结果,自适应地用 GCContainer 和 TCGCContainer 包装目标网络中的特定模块。检查点调整策略的实现方式即为:
空间分割:将一个
GCContainer拆分成多个。时间分割:将
GCContainer变换成TCGCContainer,或者增加TCGCContainer的分割块数。贪心还原:将
GCContainer或TCGCContainer解包。
用户无需了解底层实现,只需调用 memory_optimization ,即可自动网络结构转换。
高层预设与摘要#
除了直接指定 level=0..4 , memory_optimization 现在还提供了更高层的 profile 预设:
"safe":保守模式。仅启用逐层GC,关闭高开销 profiling,适合快速试用。"balanced":推荐默认模式。启用有限的 split 搜索,在显存收益和优化耗时之间取得折中。"memory":更偏向显存优化。默认会尝试时间/空间 split。"exhaustive":激进模式。允许更完整的搜索和 greedy unwrap,适合离线调优。
这些 profile 的实际效果和取舍大致如下:
"safe":优化器自身开销最低,通常只做逐层GC,适合先快速验证功能是否可用。"balanced":通常是最推荐的起点。会尝试有限的 split 搜索,往往能在显存收益和优化耗时之间取得较好平衡。"memory":更积极地追求峰值显存下降,更可能启用空间/时间 split;代价是优化器本身更慢,训练速度也更可能下降。"exhaustive":适合离线调参或论文实验。它会尝试更完整的搜索流程,最有机会找到更激进的结构调整,但优化耗时最高。
如果不确定如何选择,建议优先从 "balanced" 开始;若只想快速启用并尽量减少额外开销,可先尝试 "safe" ;若显存非常紧张,再考虑 "memory" 或 "exhaustive" 。
如果用户希望显式限制优化器本身的开销,可设置 allow_expensive_profiling=False 。此时会自动收紧 split 搜索预算,并关闭 profiling worker 的 warmup。
在此基础上,当前版本还提供了两层更高阶的自动控制:
checkpoint_budget:控制 有多少目标模块会被包装成检查点片段 。可选"speed"、"balanced"、"memory"。"speed":只对一部分最“值钱”的热点模块做 checkpoint,优先减少额外训练开销。"balanced":覆盖更多热点模块,在显存和训练速度之间取折中。"memory":尽可能覆盖全部候选模块,更偏向显存下降。
prefer:再往上一层的“目标导向”入口。可选"speed"、"balanced"、"memory"。当用户没有显式指定profile或checkpoint_budget时,会自动映射为推荐组合:prefer="speed"->profile="safe"+checkpoint_budget="speed"prefer="balanced"->profile="balanced"+checkpoint_budget="balanced"prefer="memory"->profile="memory"+checkpoint_budget="memory"
这意味着,用户现在可以用三种粒度来控制 memopt:
只想要最简单的高层接口:直接指定
prefer=...希望分别控制搜索激进度与 checkpoint 覆盖范围:组合
profile和checkpoint_budget需要精细实验:继续使用
level、max_gc_wrapped_modules、gc_target_budget_ratio等底层参数
为了给这些取舍提供一个更直观的量化参考,我们在服务器上的一张 RTX 4090 上,对一个较小的合成工作负载做了对比测试。测试模型为 MemOptBlockNet(depth=1) ,输入形状为 [T, N, C] = [2, 2, 16] ,每个配置均测量了 memory_optimization 自身耗时、优化后单步训练耗时以及训练峰值显存。未优化 baseline 的单步训练耗时约为 5.80 ms , peak_allocated 为 17.26 MB , peak_reserved 为 22.0 MB 。四个 profile 的结果如下:
Profile |
|
单步训练耗时 |
|
|
结构变化 |
|---|---|---|---|---|---|
|
|
|
|
|
仅包装为 1 个 |
|
|
|
|
|
1 次 spatial split,最终为 2 个 |
|
|
|
|
|
1 次 spatial split,最终为 2 个 |
|
|
|
|
|
1 次 spatial split,最终为 2 个 |
需要强调的是,这组数据的主要用途是说明不同 profile 的 优化器开销趋势 ,而非给出对所有网络都成立的通用绝对值。对于真实的大模型,具体的训练速度和显存收益仍取决于网络结构、输入形状、batch size 以及当前设备环境。
为了更贴近真实使用场景,我们还在同一张 RTX 4090 上,对教程后文将介绍的真实网络 CIFAR10DVSVGG 做了对比。测试配置为:
后端:
triton输入形状:
[N, T, C, H, W] = [8, 10, 2, 48, 48]指标:
samples/s:训练吞吐step_ms:单步训练耗时peak_allocated_mb:训练峰值已分配显存peak_reserved_mb:训练峰值保留显存optimize_ms:执行memory_optimization的耗时
结果如下:
配置 |
|
|
|
|
|
结构变化 |
|---|---|---|---|---|---|---|
baseline |
|
|
|
|
|
无优化 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
这组真实网络数据反映了更实际的取舍:
safe是最稳妥的入门选项,显存开始明显下降,但训练会变慢。balanced在这组实验里比safe再省一些显存,同时训练速度略好。memory继续降低峰值显存,但优化器自身耗时已经明显上升。exhaustive在这组实验里给出了最好的显存结果,而且单步训练速度几乎回到 baseline,但它的结构搜索成本极高,更适合离线调优。
如果把目光缩小到新的高层接口 prefer ,在同一网络、同一输入形状下也能观察到比较清晰的梯度:
|
自动映射 |
选中的 checkpoint 模块数 |
|
|
|
|---|---|---|---|---|---|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
可以把它理解为: prefer 直接回答“这次优化更偏训练速度,还是更偏显存”,而内部再自动决定该用什么 profile 和 checkpoint 覆盖预算。
另外,若设置 return_summary=True ,函数将返回 (net, summary) 。 summary 是 MemOptSummary 对象,包含:
请求/实际生效的优化级别
使用的
prefer、profile、checkpoint_budget和allow_expensive_profiling配置哪些优化步骤被应用、哪些步骤被跳过
包装成
GCContainer/TCGCContainer的数量自动选择的压缩器统计、checkpoint 候选数与实际选中数,以及空间/时间 split、greedy unwrap 的执行次数
gc_selected_modules/gc_selection_explanation:说明这次为什么选中了这些 checkpoint 模块recommendation:基于当前选择结果给出的下一步调参建议,例如更偏速度还是更偏显存
示例#
以在CIFAR10-DVS上训练Spiking VGG为例,讲解如何使用上述工具。Spiking VGG模型定义如下:
import torch
import torch.nn as nn
from spikingjelly.activation_based import layer, neuron, surrogate, functional
class VGGBlock(nn.Module):
def __init__(
self, in_plane, out_plane, kernel_size, stride, padding,
preceding_avg_pool=False, **kwargs
):
super().__init__()
proj_bn = []
if preceding_avg_pool:
proj_bn.append(layer.AvgPool2d(2))
proj_bn += [
layer.Conv2d(in_plane, out_plane, kernel_size, stride, padding),
layer.BatchNorm2d(out_plane),
]
self.proj_bn = nn.Sequential(*proj_bn)
self.neuron = neuron.LIFNode(**kwargs)
def forward(self, x_seq):
return self.neuron(self.proj_bn(x_seq))
class CIFAR10DVSVGG(nn.Module):
def __init__(
self, dropout: float = 0.25, tau: float = 1.333,
decay_input: bool = False, detach_reset: bool = True,
surrogate_function=surrogate.ATan(), backend="triton",
):
super().__init__()
kwargs = {
"tau": tau,
"decay_input": decay_input,
"detach_reset": detach_reset,
"surrogate_function": surrogate_function,
"backend": backend,
"step_mode": "m",
}
self.features = nn.Sequential(
VGGBlock(2, 64, 3, 1, 1, False, **kwargs),
VGGBlock(64, 128, 3, 1, 1, False, **kwargs),
VGGBlock(128, 256, 3, 1, 1, True, **kwargs),
VGGBlock(256, 256, 3, 1, 1, False, **kwargs),
VGGBlock(256, 512, 3, 1, 1, True, **kwargs),
VGGBlock(512, 512, 3, 1, 1, False, **kwargs),
VGGBlock(512, 512, 3, 1, 1, True, **kwargs),
VGGBlock(512, 512, 3, 1, 1, False, **kwargs),
layer.AvgPool2d(2),
)
d = int(48 / 2 / 2 / 2 / 2)
l = [nn.Dropout(dropout)] if dropout > 0 else []
l.append(nn.Linear(512 * d * d, 10))
self.classifier = nn.Sequential(*l)
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode="fan_out", nonlinearity="relu")
functional.set_step_mode(self, "m")
def forward(self, input):
functional.reset_net(self)
# input.shape = [N, T, C, H, W]
input = input.transpose(0, 1).contiguous() # [T, N, C, H, W]
x = self.features(input)
x = torch.flatten(x, 2) # [T, N, D]
x = self.classifier(x)
return x
注意:在 CIFAR10DVSVGG 的构造函数中,整个网络被配置为以多步模式运行。
欲使用 memory_optimization ,用户只需做以下准备。
Step 1. 定义分割规则#
memory_optimization 将按以下方式尝试对一个 GCContainer 做空间分割:
若
GCContainer的成员模块数量n>1,则将其拆分成n个片段。每个成员模块独自构成一个片段。若
GCContainer成员模块数量n==1,则调用该成员的__spatial_split__方法,得到一个模块元组。该元组中的每个模块都构成一个拆分后的检查点片段。若上述方法都不可行,则当前片段不可沿空间分割。
换言之,用户只需定义 __spatial_split__ 方法,返回一个模块元组,即可实现空间分割。对于 VGGBlock 而言,可以定义为:
class VGGBlock(nn.Module):
...
def __spatial_split__(self):
return self.proj_bn, self.neuron
memory_optimization 的时间分割将自动借助 to_functional_forward 实现,无需手动定义规则。
Step 2. 显式声明压缩器(可选)#
memory_optimization 会自动探测每个检查点模块的输入分布。若输入是二值的,则会使用比特压缩器 BitSpikeCompressor 进行压缩;否则,使用空压缩器 NullSpikeCompressor (即:不压缩)。自动探测机制无法穷尽所有情况,存在出现错误的可能;用户有时也希望使用其它类型的压缩器。为此,用户可以显式声明每个检查点片段的压缩器,以覆盖自动探测的结果。
例如, 如果 CIFAR10DVSVGG 的输入并非二值,可以这样声明:
class CIFAR10DVSVGG(nn.Module):
def __init__(
self, dropout: float = 0.25, tau: float = 1.333,
decay_input: bool = False, detach_reset: bool = True,
surrogate_function=surrogate.ATan(), backend="triton",
):
...
self.features = nn.Sequential(
VGGBlock(2, 64, 3, 1, 1, False, **kwargs),
...
)
self.features[0].x_compressor = "NullSpikeCompressor"
...
这样一来,在用 GCContainer 包装 features[0] 时,将使用 NullSpikeCompressor 作为其输入压缩器。 x_compressor 属性可被赋值为 BaseSpikeCompressor 子类的实例,或是子类名称字符串(如上例);查阅 Spike Compressors 文档以获取所有可选的压缩器。
Step 3. 调用工具函数#
完成上述准备后,调用 memory_optimization 即可:
from spikingjelly.activation_based import memopt
net = CIFAR10DVSVGG(...)
net = memopt.memory_optimization(
net,
(VGGBlock,),
dummy_input=(torch.zeros(32, T, 2, 48, 48),),
compress_x=True,
level=4,
temporal_split_factor=2,
verbose=True,
)
查询 memory_optimization 的文档以获取参数说明。
如果用户更关注“少调参、快速拿到一个合理配置”,则推荐优先使用 profile 接口。例如:
from spikingjelly.activation_based import memopt
net, summary = memopt.memory_optimization(
net,
(VGGBlock,),
dummy_input=(torch.zeros(32, T, 2, 48, 48),),
profile="balanced",
allow_expensive_profiling=False,
return_summary=True,
)
print(summary.applied_steps)
print(summary.skipped_steps)
print(summary.gc_container_count, summary.tcgc_container_count)
若 profile 要求 level > 1 但没有提供 dummy_input ,则框架会自动回退到 level=1 ,并在 summary.notes 中记录这一回退原因。
结果#
调用 memory_optimization ,输出为:
Level 1: layer-wise GC with input spike compression
Level 2: split GCContainers spatially
net's features.1: successfully split (2830308352 -> 2726500352)
net's features.1.0: can't be spatially split
Level 3: split GCContainers temporally
net's features.1.0: successfully split (2726500352 -> 2641563648)
net's features.1.1: successfully split (2641563648 -> 2338393088)
net's features.2: successfully split (2338393088 -> 2132545536)
net's features.1.1: no reduction in memory, revert (2132545536 -> 2147287040)
Level 4: greedily disable GCContainers
net's features.3: disable GCContainer (2132545536 -> 2126712832)
net's features.1.0: keep GCContainer (2126712832 -> 2687308800)
net's features.2: keep GCContainer (2126712832 -> 2898722816)
net's features.5: disable GCContainer (2126712832 -> 2123108352)
net's features.4: keep GCContainer (2123108352 -> 2232676352)
net's features.1.1: disable GCContainer (2123108352 -> 2039347200)
net's features.0: keep GCContainer (2039347200 -> 2417163264)
net's features.6: disable GCContainer (2039347200 -> 2036398080)
net's features.7: disable GCContainer (2036398080 -> 2036316160)
优化后的网络结构大致为:
(net): CIFAR10DVSVGG(
(features): Sequential(
(0): GCContainer(
x_compressor=NullSpikeCompressor,
(0): VGGBlock(...)
)
(1): Sequential(
(0): TCGCContainer(
x_compressor=BitSpikeCompressor, n_chunk=2, n_seq_inputs=1, n_seq_outputs=1
(0): Sequential(
(0): Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), step_mode=m)
(1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True, step_mode=m)
)
)
(1): LIFNode()
)
(2): TCGCContainer(
x_compressor=BitSpikeCompressor, n_chunk=2, n_seq_inputs=1, n_seq_outputs=1
(0): VGGBlock(...)
)
(3): VGGBlock(...)
(4): GCContainer(
x_compressor=BitSpikeCompressor,
(0): VGGBlock(...)
)
(5): VGGBlock(...)
(6): VGGBlock(...)
(7): VGGBlock(...)
(8): AvgPool2d(kernel_size=2, stride=2, padding=0, step_mode=m)
)
(classifier): Sequential(
(0): Dropout(p=0.25, inplace=False)
(1): Linear(in_features=4608, out_features=10, bias=True)
)
)
在 CIFAR10-DVS 上训练, 令 batch_size=32 且 T=10 。未经优化的CuPy后端网络、未经优化的Triton后端网络,以及优化后的Triton后端网络在 epoch=5 时的训练日志为:
# CuPy backend, not optimized (level=0)
Epoch 5/100: train_samples_per_second=349.36 samples/s
Epoch 5/100: peak_allocated=4966.7451171875 MB, peak_reserved=5370.0 MB
Epoch 5/100: train_loss=1.63, train_acc=47.92%
# Triton backend, not optimized (level=0)
Epoch 5/100: train_samples_per_second=383.55 samples/s
Epoch 5/100: peak_allocated=3830.3056640625 MB, peak_reserved=5544.0 MB
Epoch 5/100: train_loss=1.64, train_acc=47.42%
# Triton backend, optimized (level=4)
Epoch 5/100: train_samples_per_second=315.77 samples/s
Epoch 5/100: peak_allocated=1973.11767578125 MB, peak_reserved=2770.0 MB
Epoch 5/100: train_loss=1.64, train_acc=47.89%
可见,训练峰值显存显著降低,而训练速度的降低可以接受。优化后的Triton后端网络与未经优化的Triton后端网络并非完全等价,是对BN层的计算做时间分段的结果,详见原论文 Appendix G [1] 。完整可运行的示例代码位于 spikingjelly.activation_based.examples.memopt 中。